
/* Remove Explore Projects filter bar */
🚀 Technical Projects Portfolio
Innovative Solutions in Computer Vision & AI
Explore my journey through cutting-edge projects spanning personal innovations, academic research, and open-source contributions. Each project represents a unique challenge solved through advanced computer vision and machine learning techniques.
🔍 Explore Projects
Master's Degree Projects
Case Western Reserve University (Aug 2023 - May 2025)
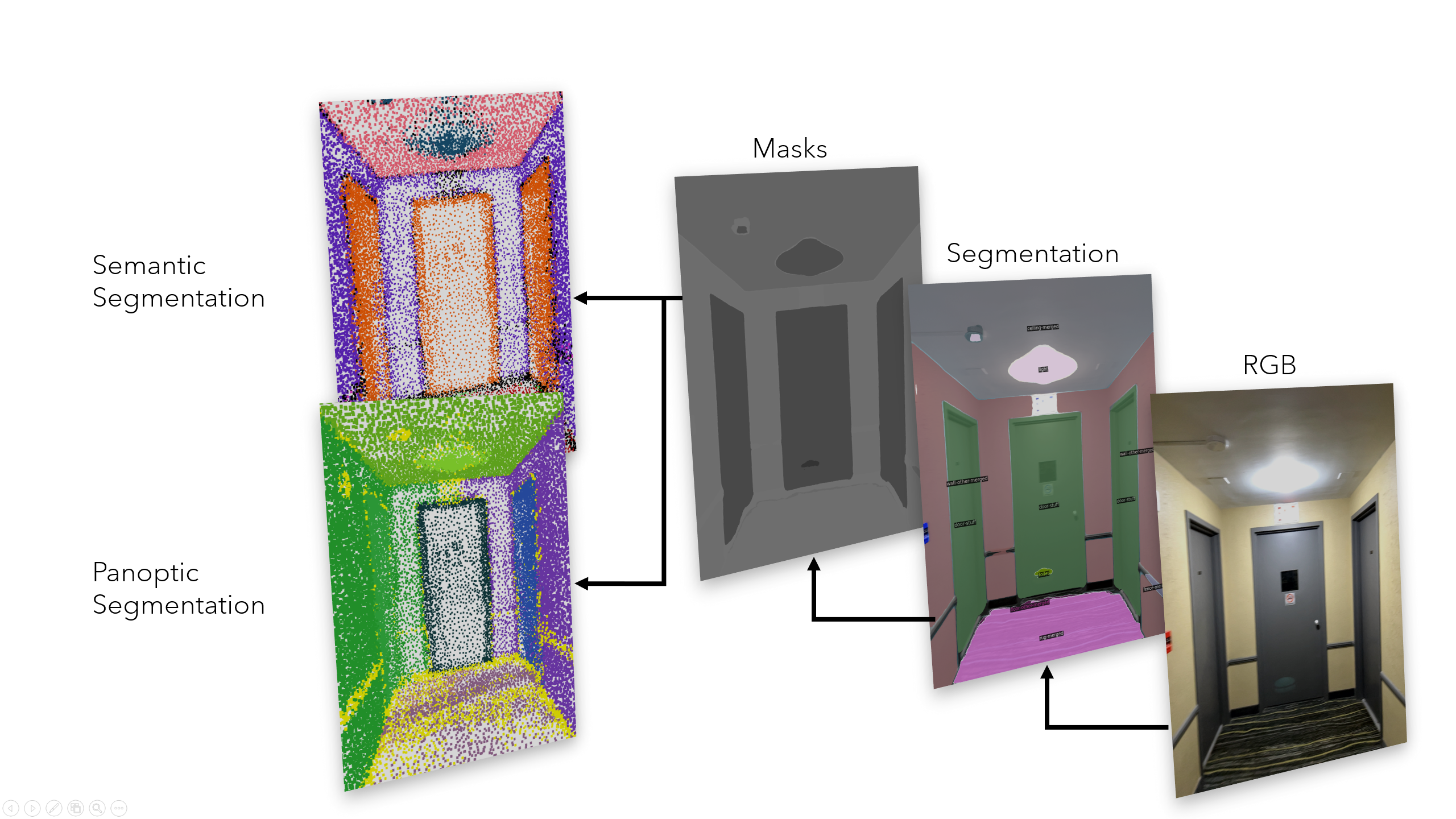
3D Point Cloud Segmentation Using 2D Image Segmentation
Novel hybrid approach leveraging OneFormer's 2D image segmentation with 3D point-cloud analysis, significantly reducing computational complexity compared to traditional deep learning methods.
View Technical Details
🎯 Technical Innovation
- Data Capture: iPhone 13 Pro LiDAR with RTAB framework for real-time extraction
- 2D Segmentation: OneFormer model for semantic, instance, and panoptic segmentation
- 3D Processing: Voting-based approach using camera calibration and back-projection
- Fusion Algorithm: COLMAP-inspired structure-from-motion pipeline
🔧 Key Achievements
- Superior computational efficiency vs. PointNet/PointFormer
- Novel 3D space voting using 2D segmentation masks
- Multi-modal integration of RGB, depth maps, and camera calibration
- Validated across multiple indoor and outdoor scenes
👥 Team
Dinesh Channabasappa Dhotrad, Ravi Raj Kumar, Praneeth Kollati
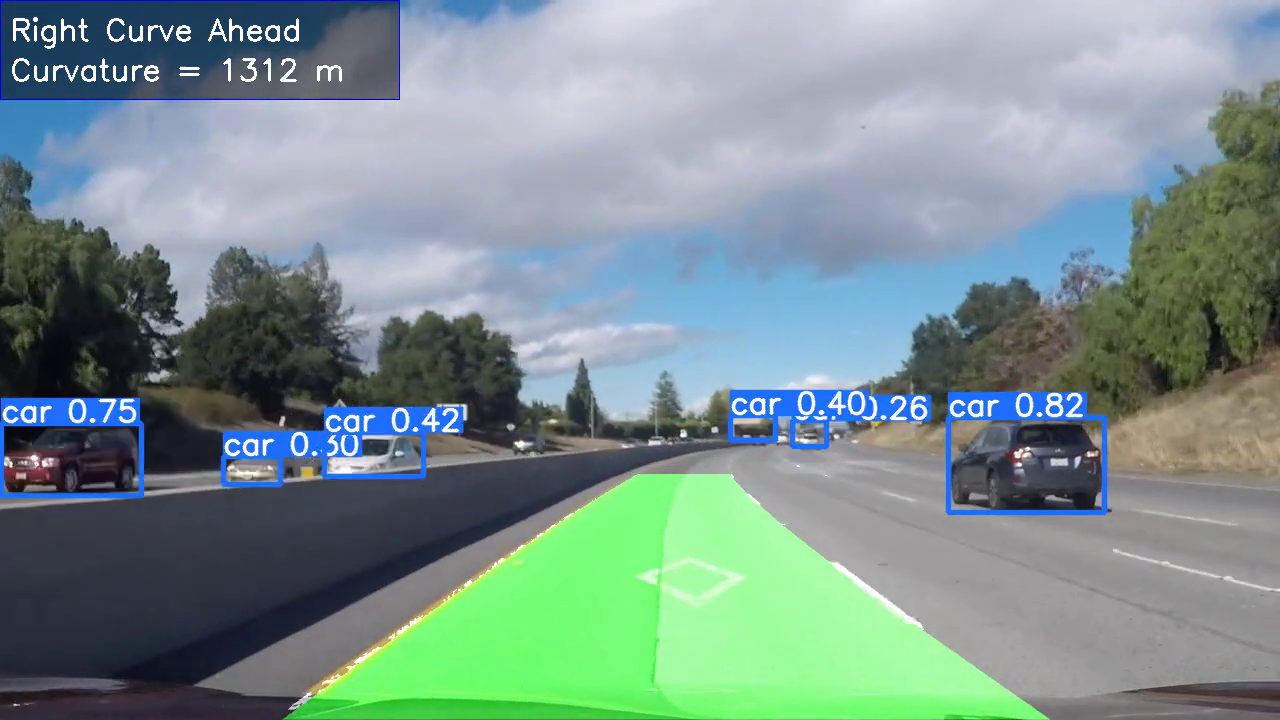
Vehicle RoadSense – Vehicle, Lane and Pedestrian Detection
Comprehensive Advanced Driver Assistance System (ADAS) integrating classical image processing with YOLOv8 deep learning for real-time vehicle, lane, and pedestrian detection.
View Technical Details
🎯 Lane Detection Pipeline
- Camera Calibration: Checkerboard-based calibration for distortion correction
- Perspective Transformation: Birds-eye view conversion for simplified lane analysis
- Color Space Processing: HLS/HSV conversion for robust lane marking detection
- Sliding Window Algorithm: Dynamic lane pixel identification and tracking
- Polynomial Fitting: Second-degree polynomial for lane curvature calculation
🔧 Performance Results
- Lane Detection Accuracy: Curvature calculation with 2646m radius precision
- Real-time Performance: 30+ FPS processing capability
- Multi-object Detection: Simultaneous vehicle, pedestrian, and lane detection
- Environmental Robustness: Effective across various lighting conditions
👥 Team
Dinesh Channabasappa Dhotrad, Praneeth Kollati
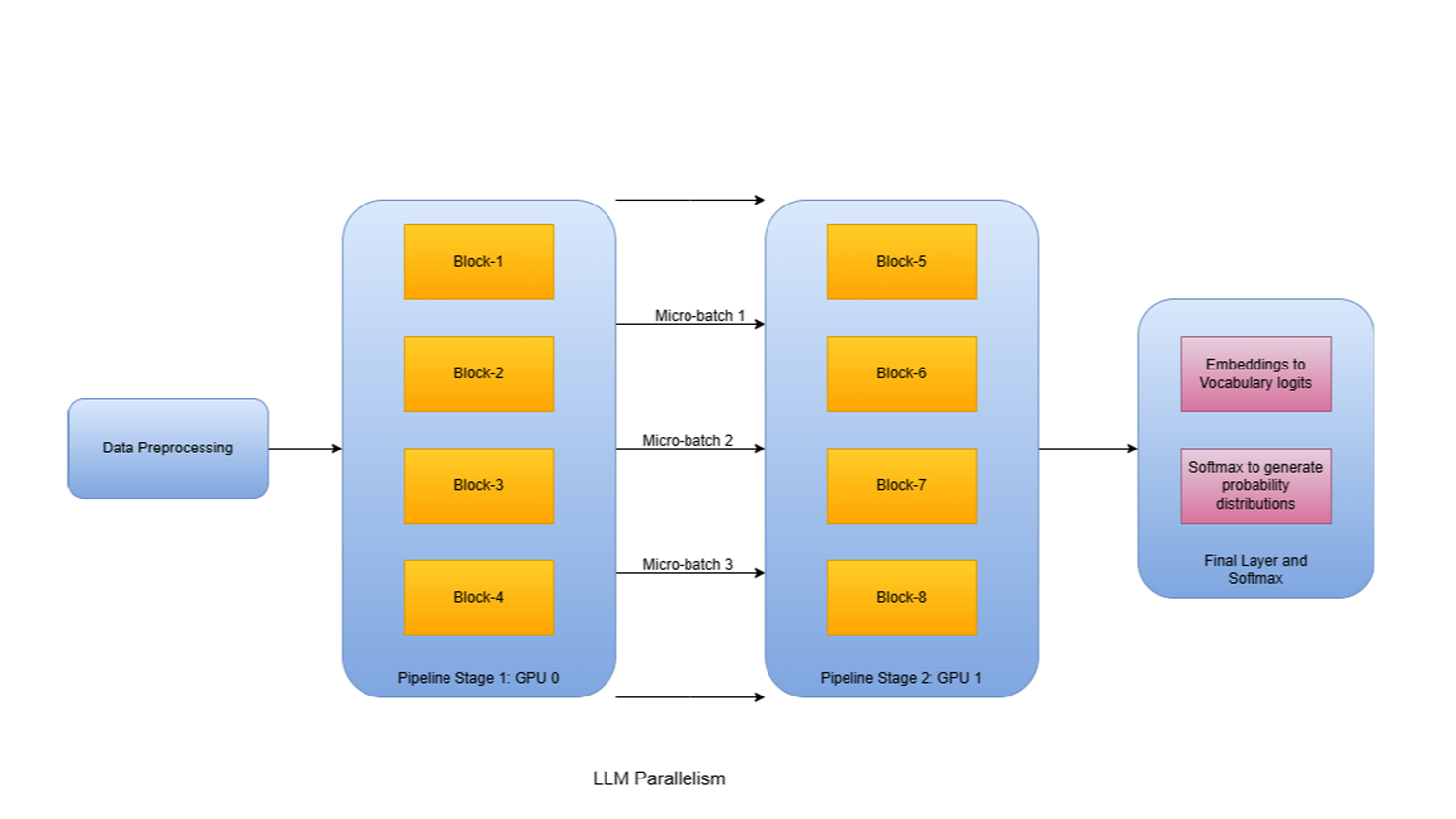
Pipeline Parallelism for Large Language Models with Insights from GPipe
Experimental implementation of GPipe-inspired pipeline parallelism for GPT-like models using PyTorch, achieving significant improvements in GPU utilization and training throughput.
View Technical Details
🎯 Technical Architecture
- Model Partitioning: Strategic layer distribution across multiple GPUs
- Microbatching: Batch division for overlapping computation and communication
- Scheduling: ScheduleGPipe implementation for optimal pipeline efficiency
- Framework: PyTorch distributed pipeline utilities and PiPPy integration
🔧 Performance Results
- Speedup Achievement: 42% improvement in training throughput
- Memory Optimization: Reduced GPU memory utilization to 65% per device
- Scalability: Enabled training of larger models than single-GPU capacity
- Hardware: Two NVIDIA GeForce RTX 2080 Ti GPUs
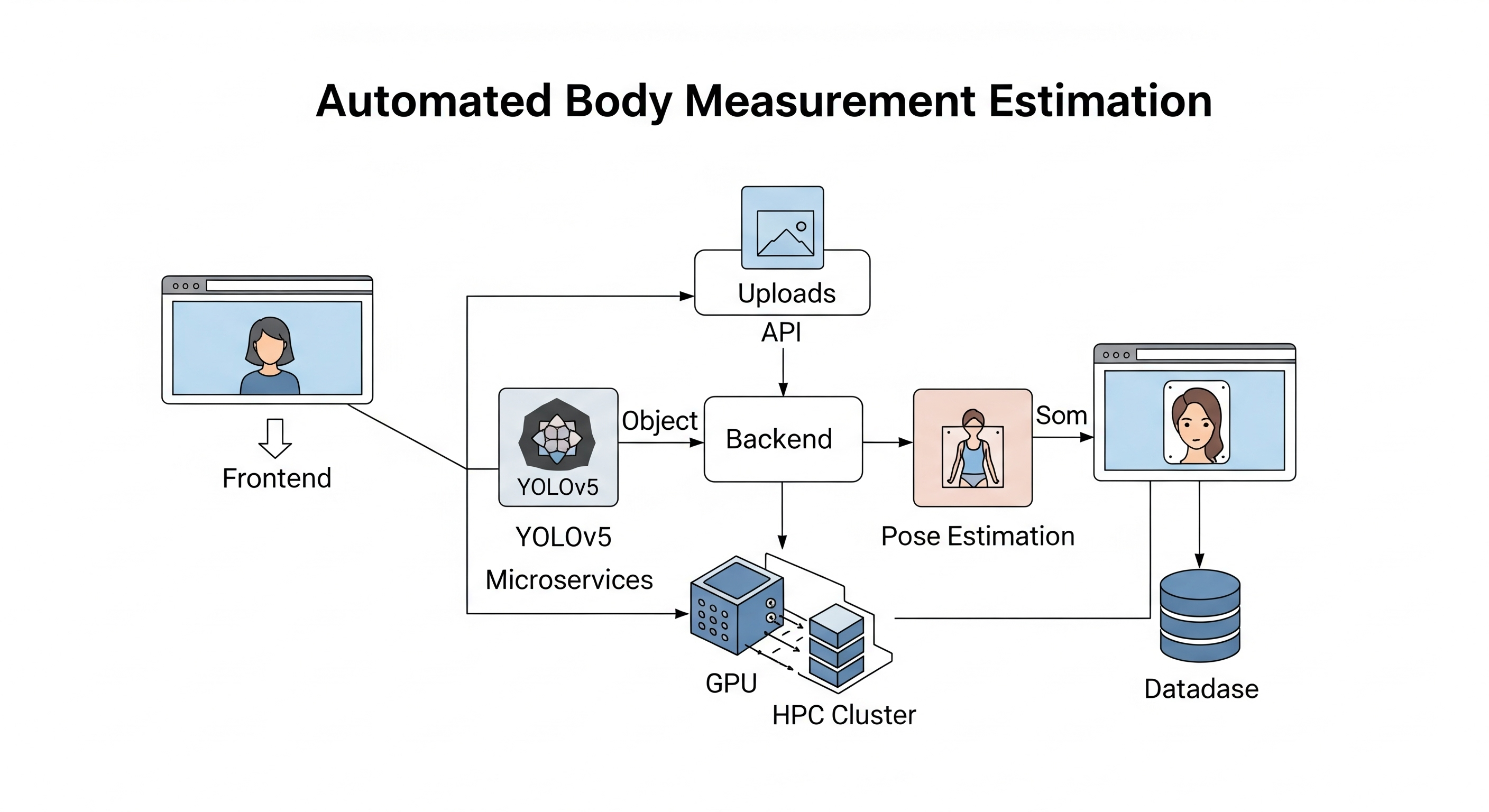
Automated Body Measurement Estimation Using YOLOv5, Pose Estimation, and GPU-Accelerated Computer Vision
Scalable automated body measurement system combining YOLOv5 object detection, pose estimation, and GPU-accelerated computing for real-time applications in fashion, fitness, and healthcare.
View Technical Details
🎯 Technical Architecture
- YOLOv5 Integration: Body landmark detection (shoulders, chest, waist, hips)
- Pose Estimation: OpenPose model for refinement and occlusion handling
- Geometric Algorithms: Precise body dimension calculations
- HPC Deployment: GPU acceleration with CUDA and PyTorch
🔧 Performance Specifications
- Accuracy: Height <2cm, Shoulder Width <1.5cm, Chest/Waist 1-2cm deviation
- Processing Speed: GPU (10ms per image), CPU (50ms per image)
- Throughput: 200+ images/second on GPU
- HPC Optimization: Multi-GPU distributed training and inference
👥 Team
Ashish Goyal, Shraddheya Tarekar, Dinesh Dhotrad, Shrabani Sen, Attiksh Ansool Panda, Parv Bharadwaj, Gautam Khandige
Bachelor's Engineering Projects
KLE Technological University (Aug 2017 - June 2021)
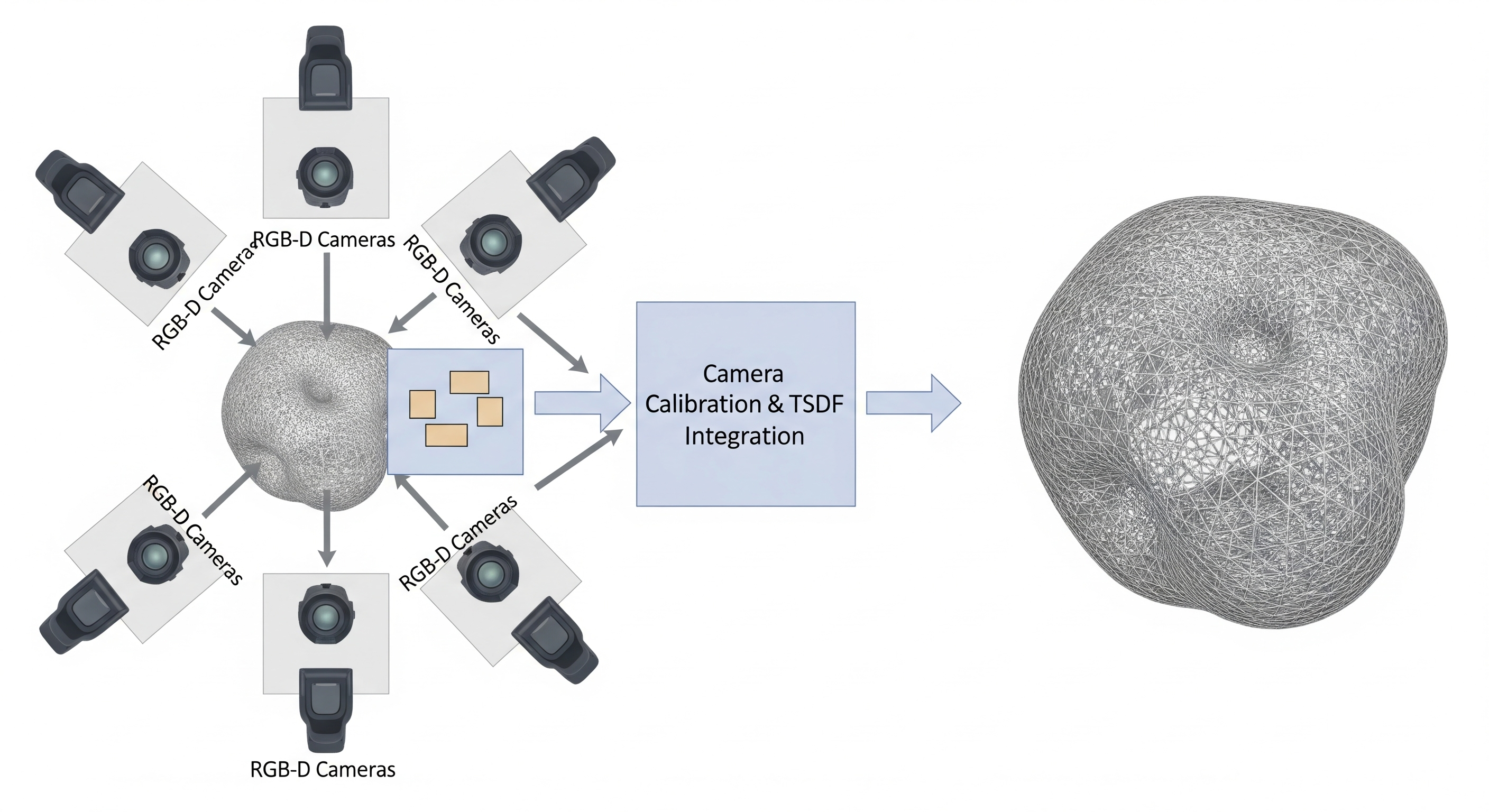
Volumetric Content Generation System
Real-time 3D reconstruction system using multiple RGB-D cameras for AR/VR content generation. Developed a pipeline for volumetric data capture and generation with multi-camera calibration and pose estimation.
View Technical Details
🎯 Technical Architecture
- Multi-Camera Setup: 8 RGB-D cameras for 360° object capture
- Calibration Method: TSAI camera calibration for accurate pose estimation
- Depth Fusion: Truncated Signed Distance Function (TSDF) for mesh generation
- Output: Real-time 3D mesh generation with proper RGB alignment
👥 Team
Sameer Kulmi, Dinesh Dhotrd, Siddharth Katageri, Shivaraj Chattannavar
👨🏫 Guide
Prof. Ramesh Tabib
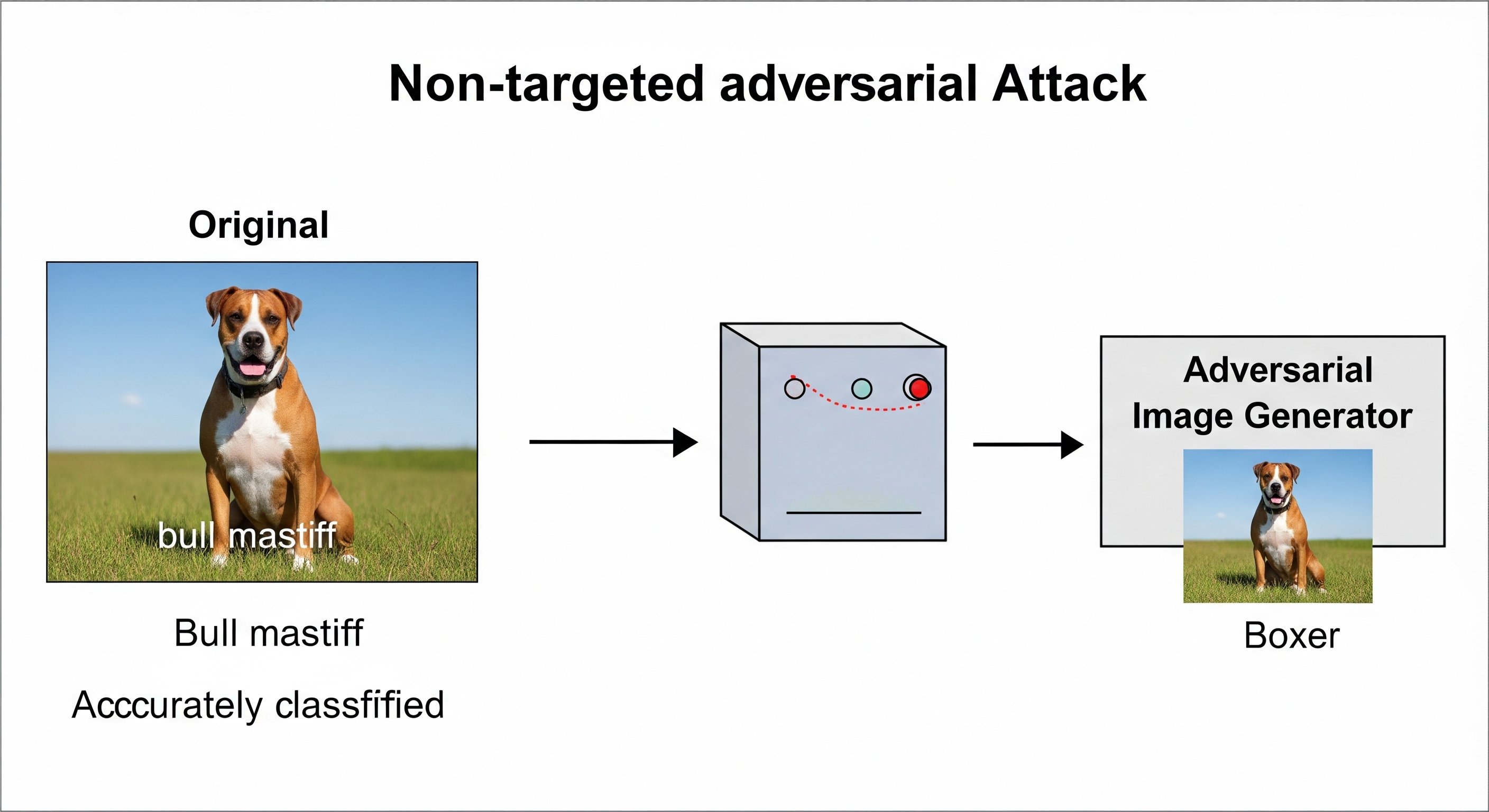
NIPS 2017: Adversarial Attack Research
Implemented non-targeted adversarial attacks on VGG16 classifier to expose vulnerabilities in deep learning models and improve ML security, using gradient descent-based perturbations.
View Technical Details
🎯 Technical Implementation
- Target Model: VGG16 trained on ImageNet dataset
- Attack Method: Non-targeted adversarial perturbations using gradient descent
- Mathematical Approach: x' = x + ε × sign(∇x J(θ,x,y))
- Dataset: 1000 unlabeled random images for attack generation
👥 Team
Dinesh Dhotrd, Jyotiba Mane, Gaurav Bhushan, K Kruthika
👨🏫 Guides
Asst. Prof. Uday Kulkarni, Asst. Prof. Sunil V G
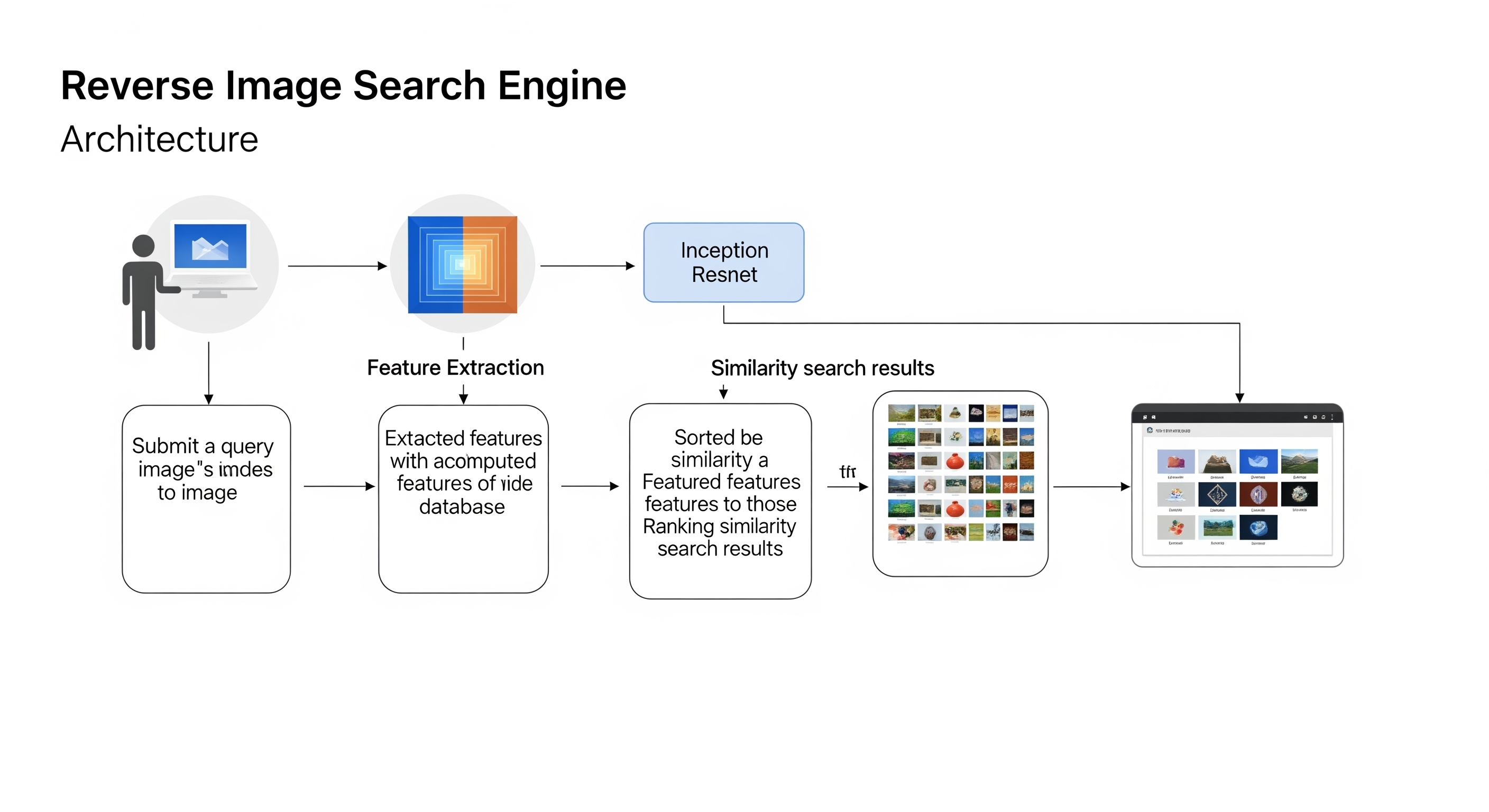
Image Reverse Search Engine on IDH Data
Developed a deep learning-based reverse image search engine specifically designed for the Indian Digital Heritage (IDH) dataset, enabling efficient retrieval of similar heritage images using Inception-ResNet architecture.
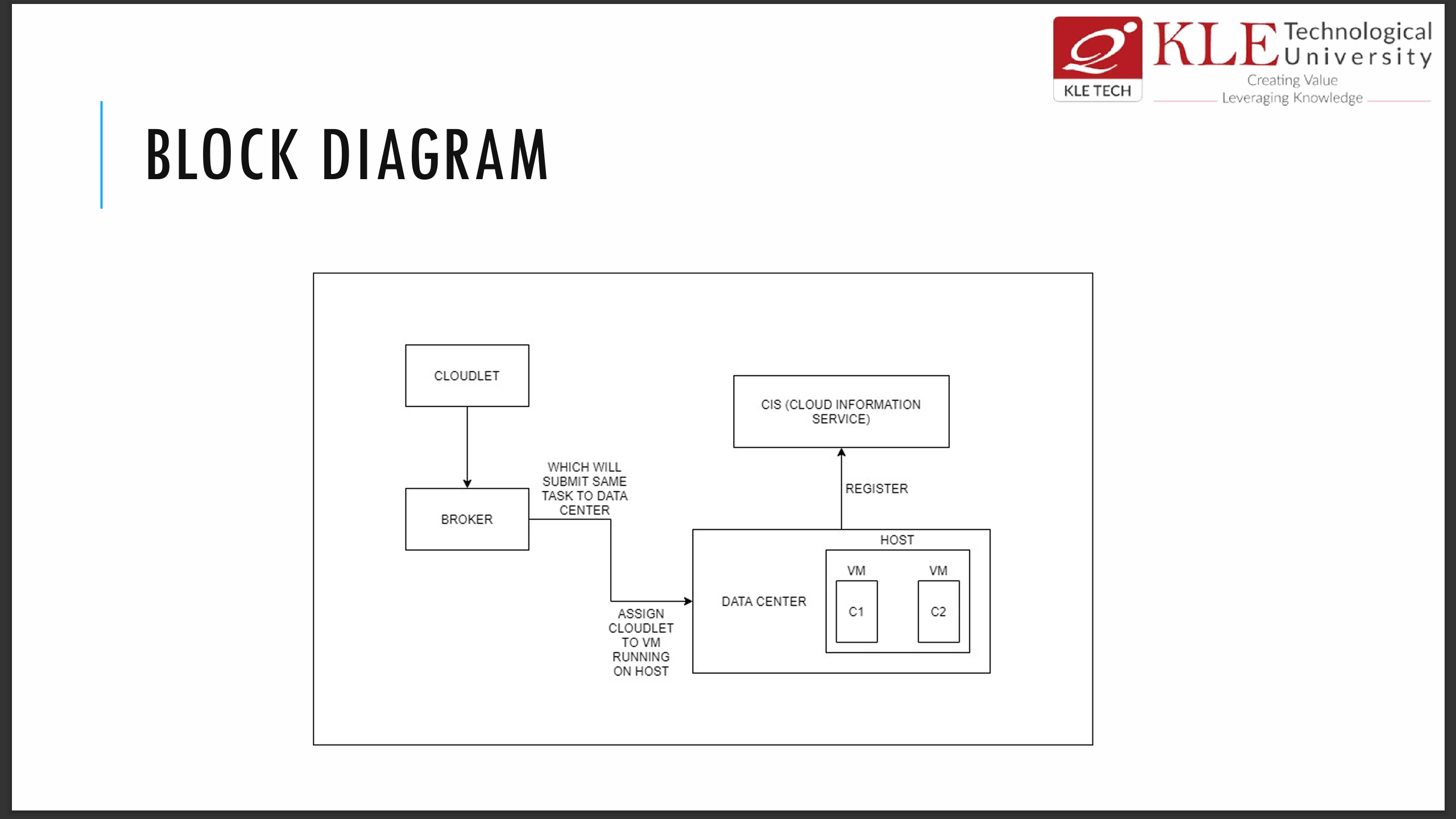
Hospital Management System
Comprehensive hospital management system with cloud services integration, focusing on dynamic insertion, stopping, and resuming of cloud simulation elements using CloudSim toolkit.
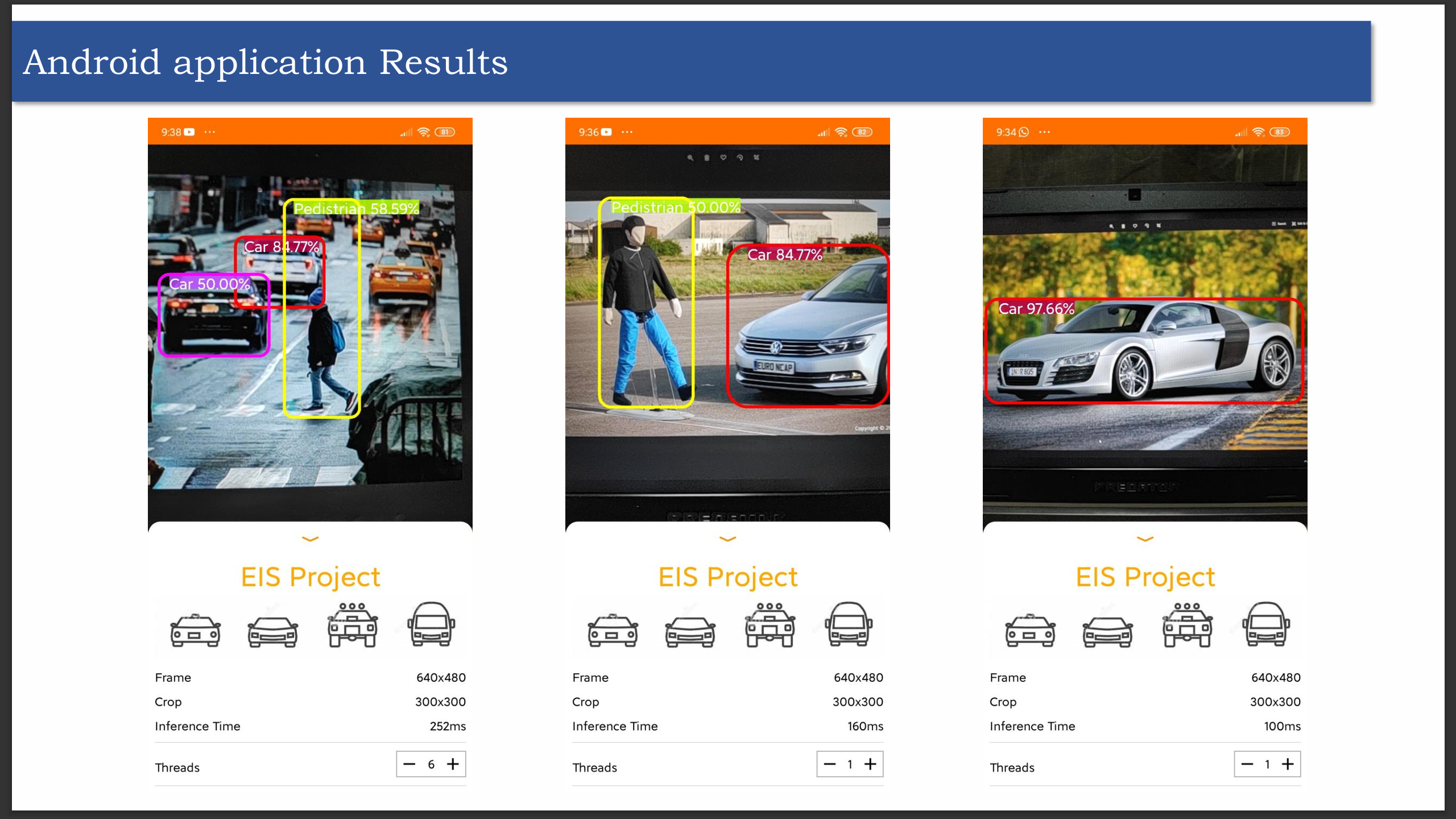
Detection and Classification of Vehicles using Deep Learning
Real-time vehicle detection and classification system using SSD-MobileNet with Android deployment for edge computing applications, achieving 95% accuracy for cars and trucks.
View Technical Details
🎯 Performance Metrics
- Training Steps: 13,000 iterations with variable learning rates
- Accuracy: Car (95%), Truck (95%), Pedestrian (84%)
- Inference Time: 100-400ms on mobile devices
- Model Size: Optimized TFLite model for edge deployment
👥 Team
Dinesh Dhotrd, Sanath Malagi, Prajwal Hebbar, Shivakumar M, Namrata Nyamagoudar
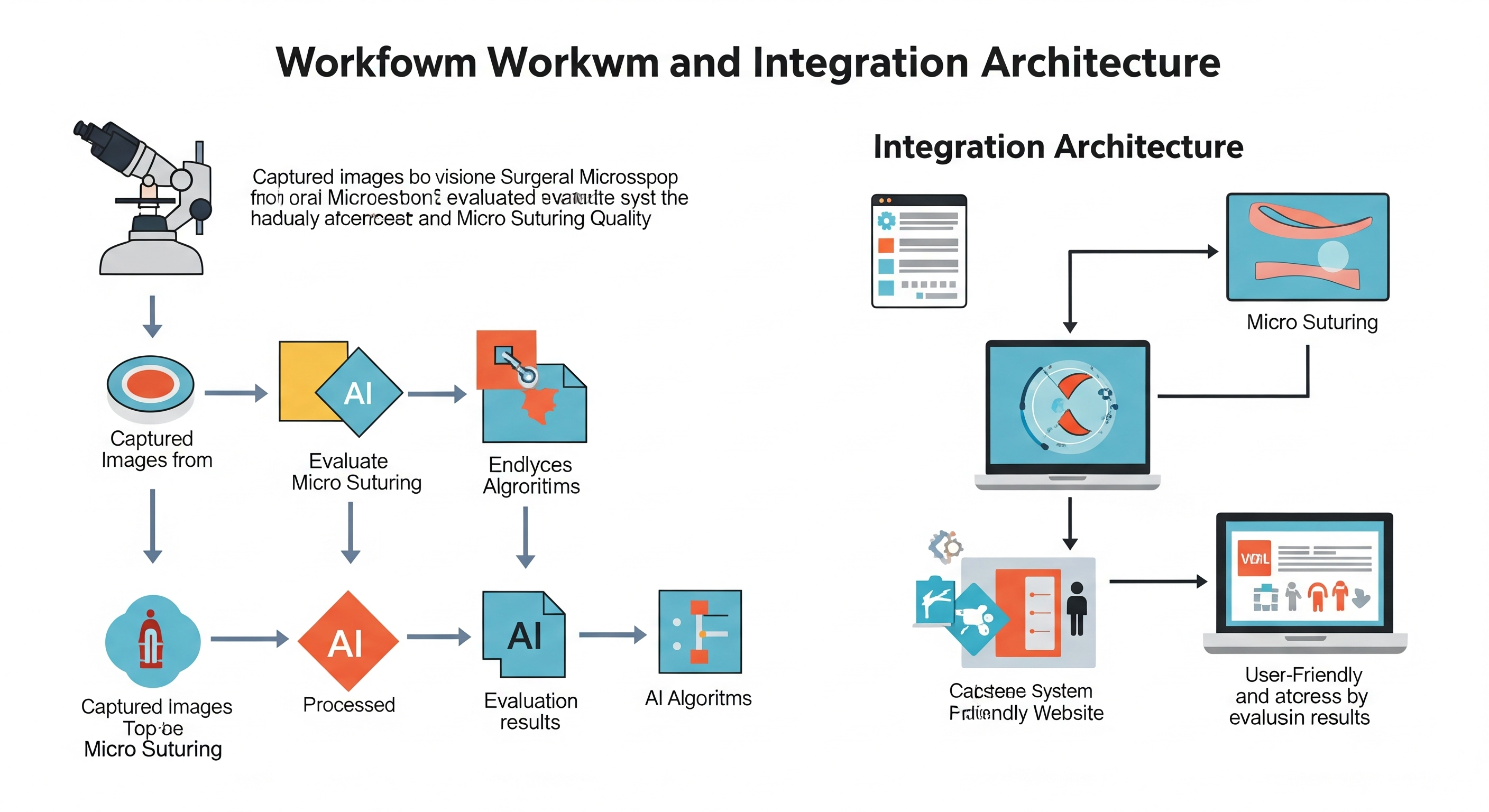
Vision Based Techniques to Evaluate Effectualness of Micro Suturing by Trainee Neuro Surgeons
Advanced computer vision system for automated assessment of micro-suturing quality performed by trainee neurosurgeons, developed in collaboration with IIT Delhi and AIIMS.
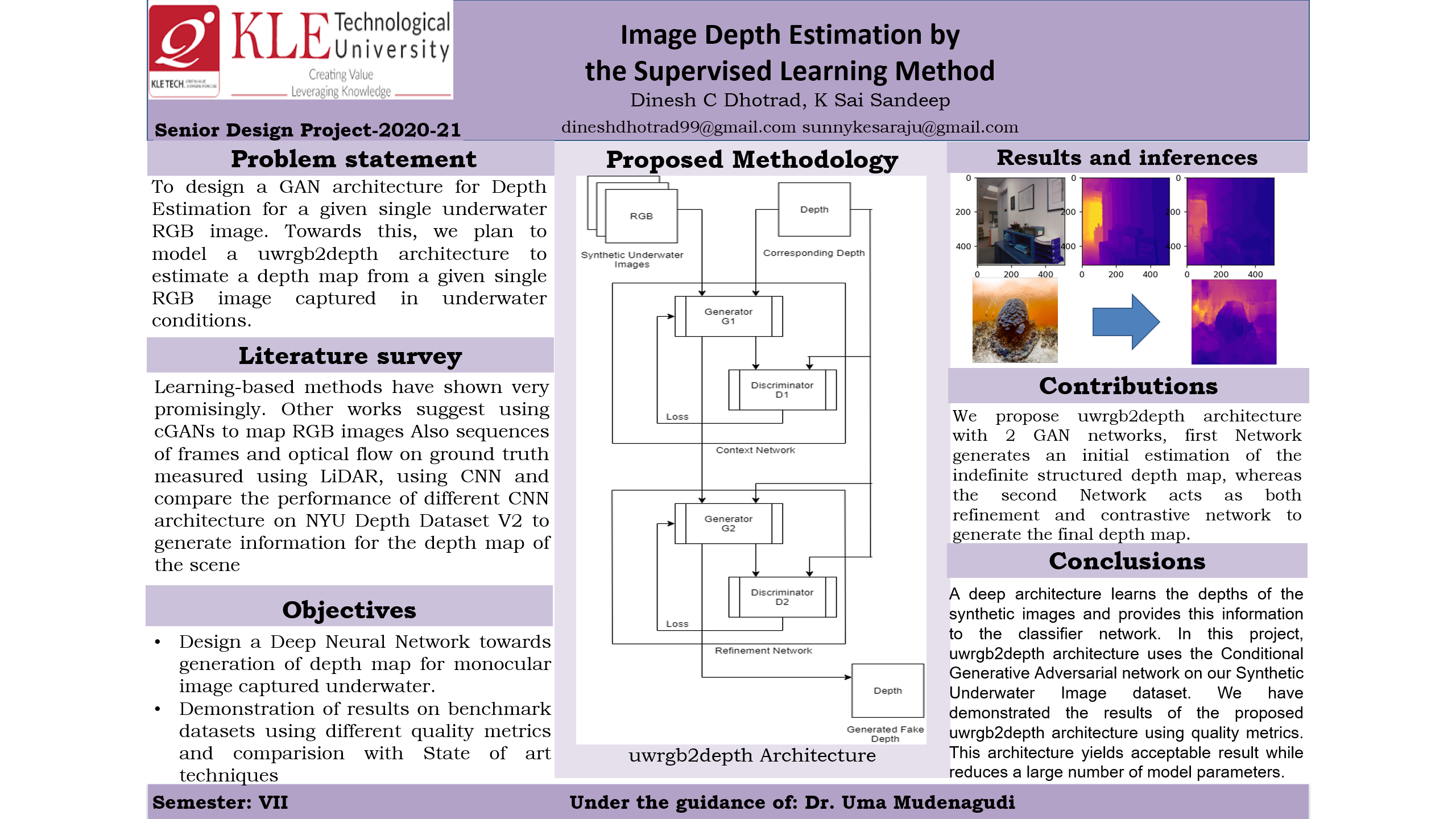
Single Image Depth Estimation in Underwater Environment
Novel GAN-based architecture (uwrgb2depth) for estimating depth maps from single RGB underwater images, addressing 3D reconstruction challenges in underwater heritage preservation.
View Technical Details
🎯 Technical Architecture
- Model Design: Dual GAN system with complementary encoder/decoder architectures
- Dataset: Synthetically generated underwater images from NYU Depth Dataset V2
- Water Types: Jerlov water classification for realistic conditions
- Loss Functions: BCE, MSE, SSIM for comprehensive training
🔧 Performance Results
- PSNR: 48.3433 (Peak Signal-to-Noise Ratio)
- SSIM: 0.7967 (Structural Similarity Index)
- Training: 40 epochs with Cosine Annealing scheduler
- Hardware: NVIDIA GV100 with PyTorch framework
👥 Team
Dinesh C Dhotrd, K Sai Sandeep
👨🏫 Guide
Dr. Uma Mudenagudi
🔗 Related Content
- Work Experience - Professional projects and implementations
- Technical Skills - Technologies and frameworks used
- Certifications - Relevant certifications and achievements
This portfolio represents a continuous journey of learning, innovation, and contribution to the computer vision and AI community. Each project has taught valuable lessons and contributed to the advancement of technology.